ACT-ROBO: Robotic Training Institute:
24/1, Feeder Road, Belghoria, Kolkata-700056, West Bengal, India.
We provide robotic training to School, College and Universities with all parts required to assemble a robot, various types of robots based on timer, photo cell, infra red ray, LASER ,etc.
Some Robots are assembled/modified/developed and demonstrated by our students:
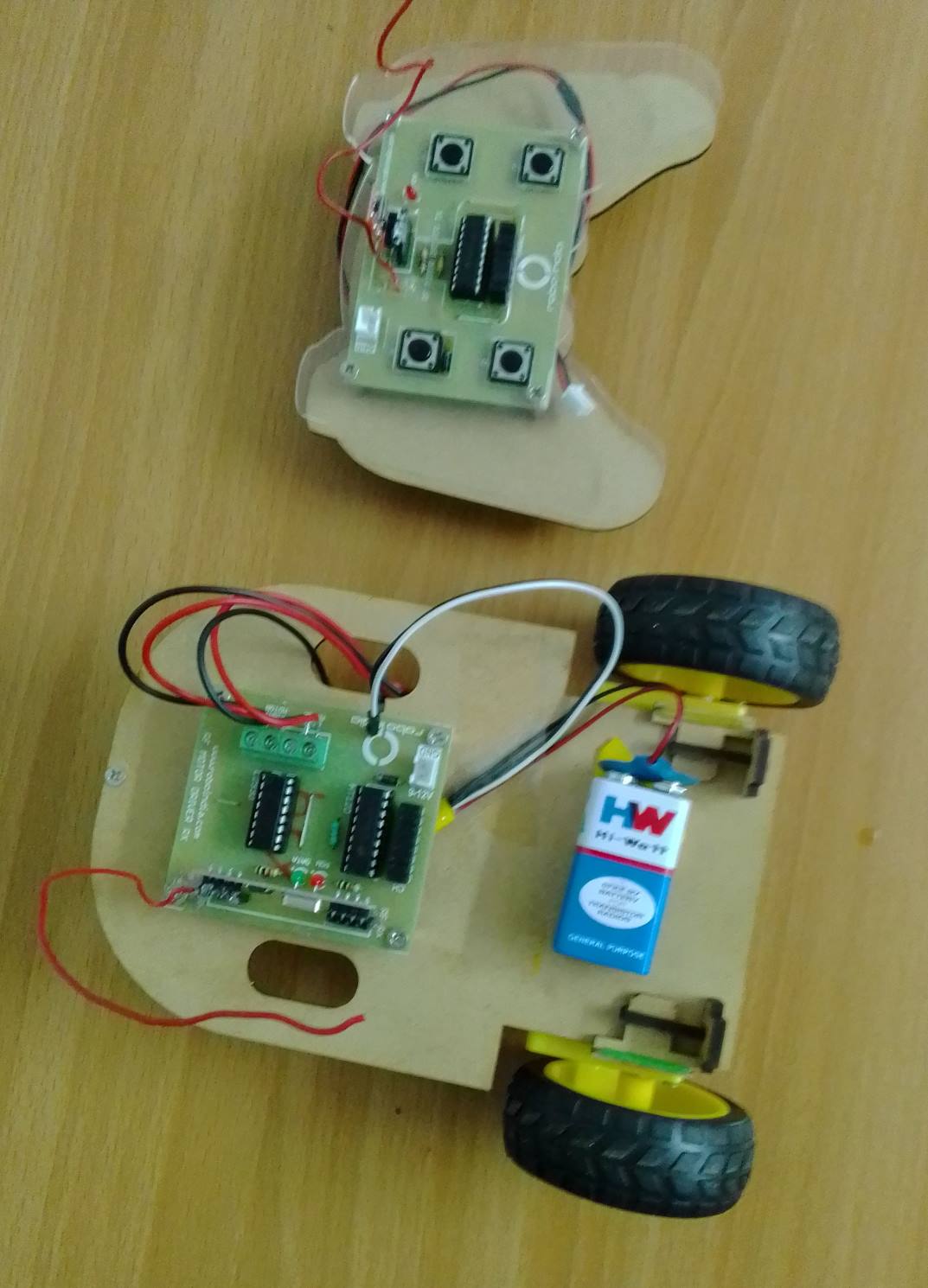
(1) Wireless Car: A model of a wireless car and a controller(Level-1): All parts are purchased, then assembled, tested for work functiongs. it is a wireless controlled car like a Toy. Learning subjects are getting some concepts about different paprts, wireless-how it works, what is wireless, how signal from the hand held controller moves to the car unit, transmitter, receiver, motor, Battery, wheel, LED(Light Emitting Diode), Switch, Sensor, IC(Integrated Circuit), PCB(Printed Circuit Board) etc.
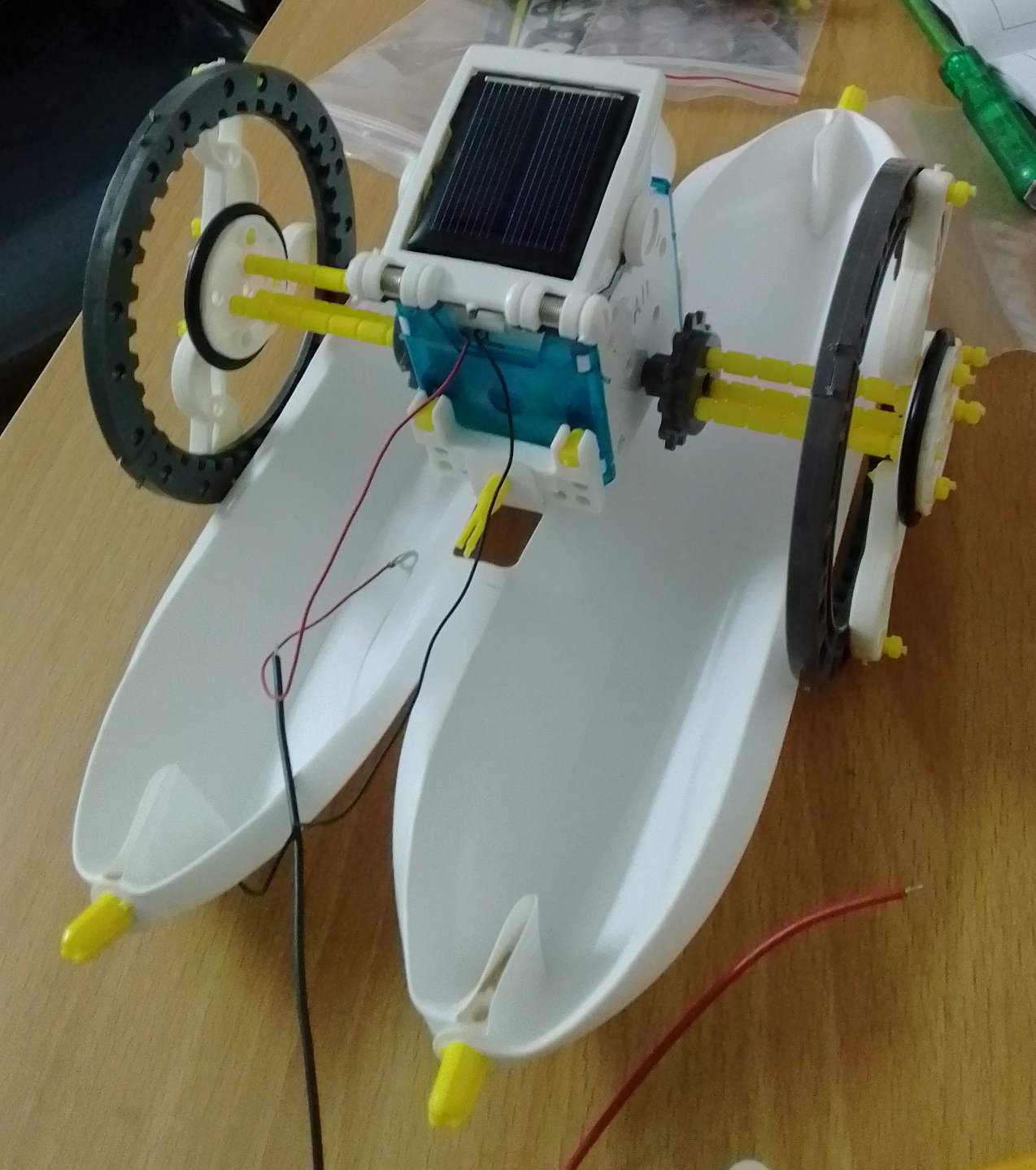
(2) Solar Boat: A model of Solar Cell based Boat(Level-2): In this project power source is a small Solar Cell. When it is exposed by Sun Light, generated electricity moves the motor and drives the Shaft of the wheel which causes movement of the boat. It has different parts like: Solar Cell, DC Motor of 360 degree movement, Gear Box with different sizes of gears etc.
(3) Driverless Car: A model of a car run by self loaded program (Level-3): It is a model of obstacle avoidance based car. Main function is that when a car moves automatically, without driver, if any obstacle is found within a short range then it will stop or moves right or left and again stars to move forward.
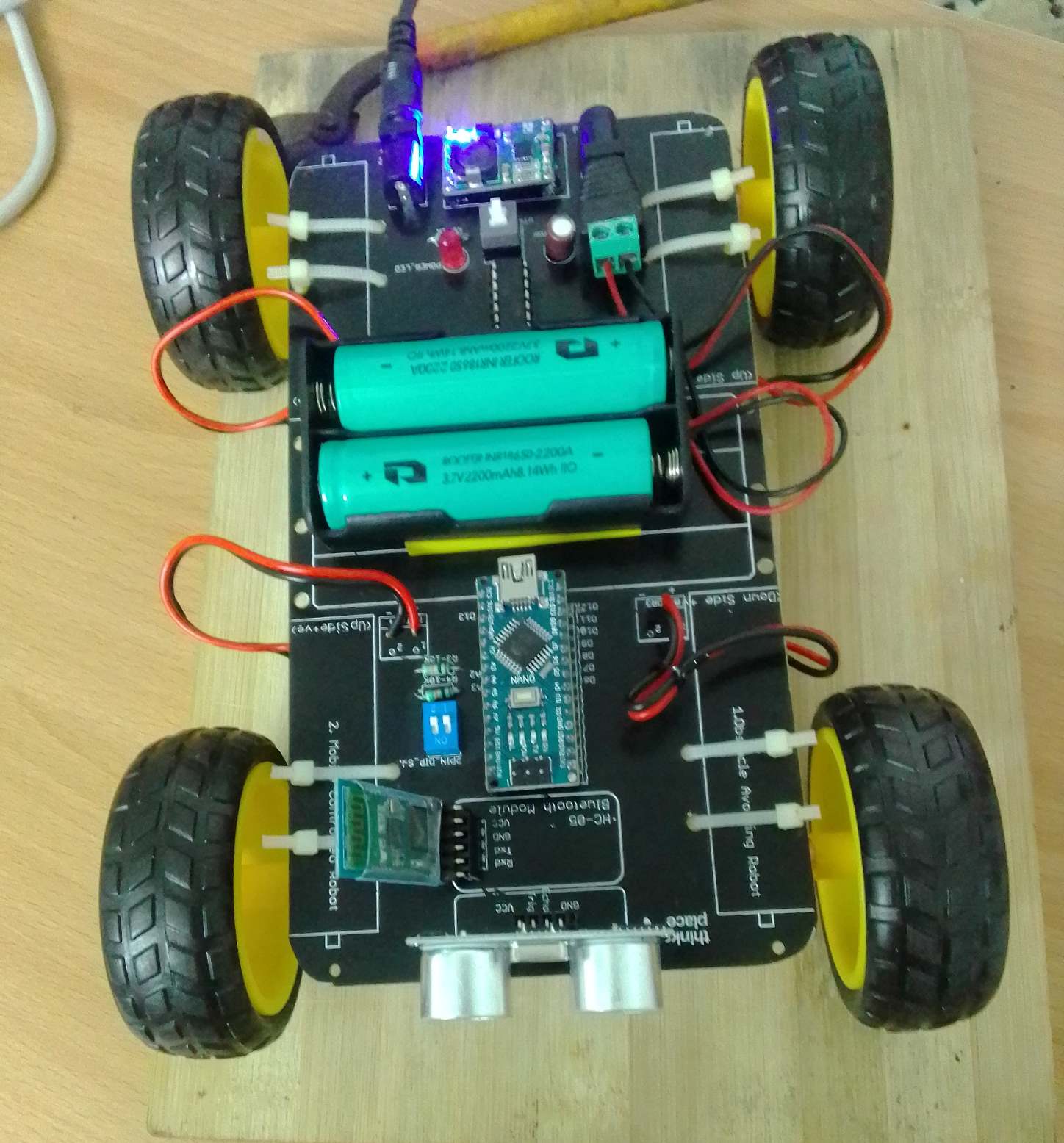
This logic of movement is controlled by a program loaded within the memory of a Atmega328P microcontroller. This program is edited, modified as expected movement of the car, then compiled and uploaded within the memory of the car. When power switch is ON, it reads the program from the memory line by line and works accordingly. It is a simple demonstration of how program/software can control a electronic hardware. Within this project many advanced units are there, there are many learning scopes of advanced levels for Engineering and research studens.
Obstacle Avoiding Car: a Video of movements are shown below. As per our program, if the car comes less than 12cm to an obstacle, it will think about and move either left of right directions as per program. Directions are controlled by START/STOP of four wheels. We placed at zero coordinate and how it changes angle and directions that are recorded in this video.
(3.a)Bluetooth-Car: The above car is moved by an App of this car. Within the car chasis, there is a bluetooth card which can connect with the app of the mobile phone.First, power button of the car should be ON, then open the app, then it will show the name of the Bluetooth device as 'HC-05', click on it to make connection with the car. Now, press any of four buttons for movement of the car. A picture of the app with buttons are shown below. Then, the running car is shown by a video as given below:

Mobile phone app can be downloaded from this link. Please, note that it is an app for mobile phone. If you download in your computer, then copy it to your mobile phone, and click on it to install this app within mobile phone. (Alternate way: from mobile phone you can open website of www.actsoft.org, then goto Training menu, from there select Robotic, then you will find download option.)
Click here to Download Mobile appWhen app installation is complete, you should power ON the Car, then open the app. (Please note that if the power of car is not swiched ON, then app will run continuously to search any related bluetooth units, if not found, mobile phone may be hanged, to overcome that you have to screen shot, clear all data from the memory of the mobile phone. Different mobile phone may have different options. Downloading and running this software means you are afreeing to use it by your confidence. We have tested manytimes without error free.
A Video of our testing is shown below:
(4) Mobile Arm: this project is a robotic arm fixed on a mobile car. When it is aimed to catch an object, keys of control panel are pressed which are connected with wires.

It can be move towards the object with the keys of control panel, can grip the object and then can move to another location and put the object at that point. It is a model of catch and drop job.
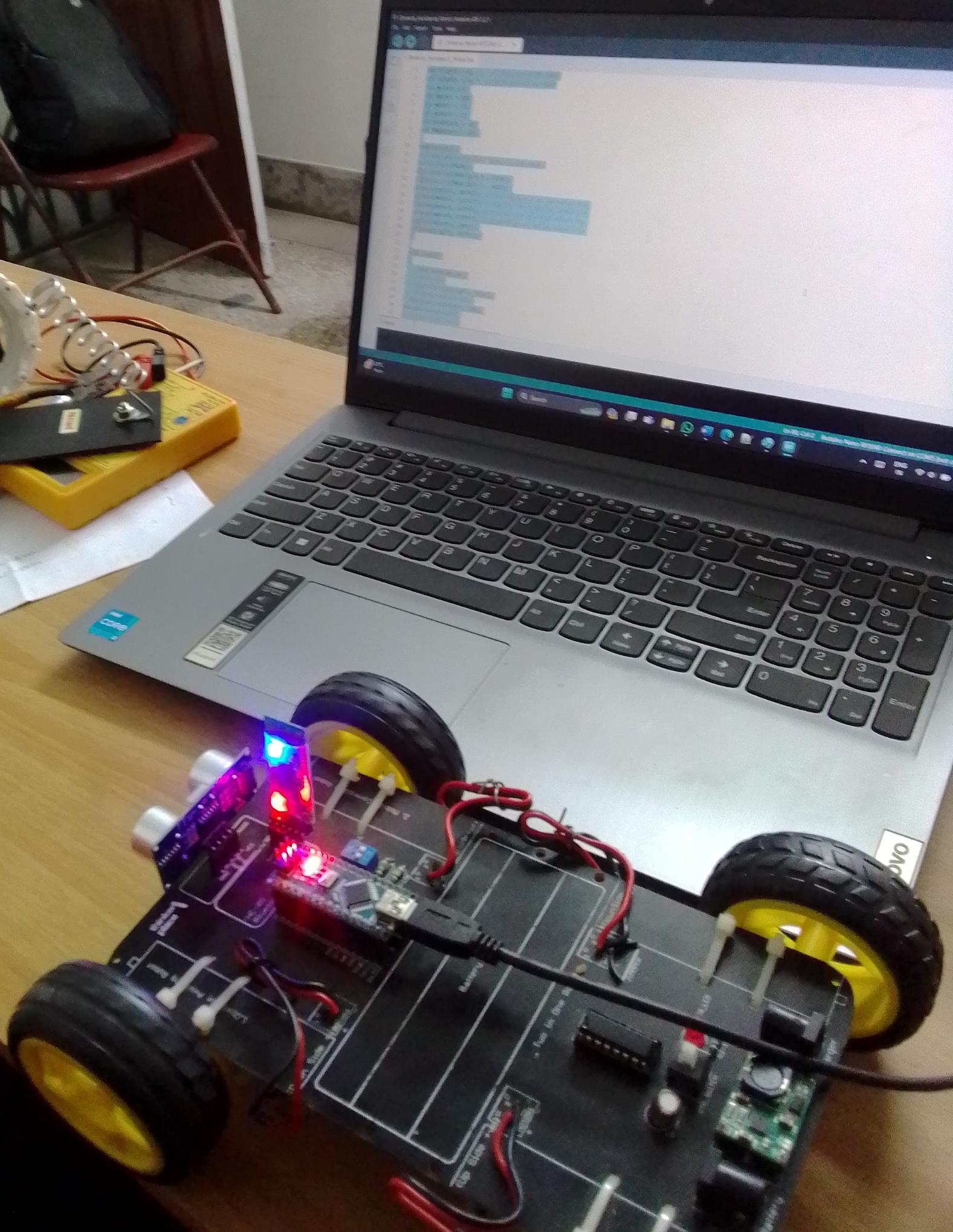
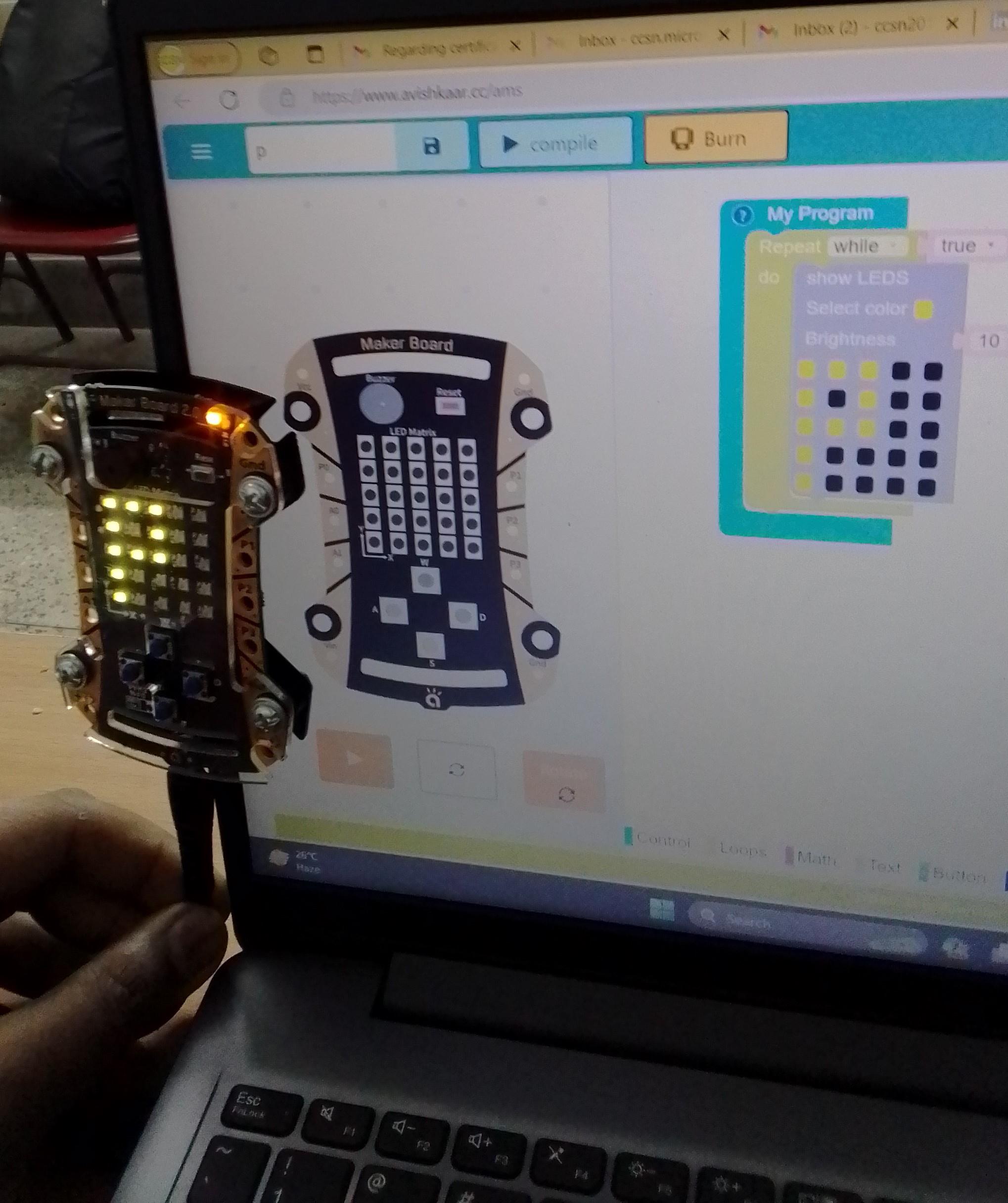
(5) Digital Pattern: this project is a Digital Pattern making board. With the help of computer and software, a pattern, or a character is written within the software, then the program is compiled and stored within the memory of the digital board. On the board there are 5x5 array of LEDs which can be programmed to make any pattern. There is options for changing of Color, brightness, blinking of LEDs etc. also. Multiple characters cna be displayed and scrolled one after another characters. This digital board can run the pattern without connection to the computer/Laptop. It is a model of making digital Signboard,
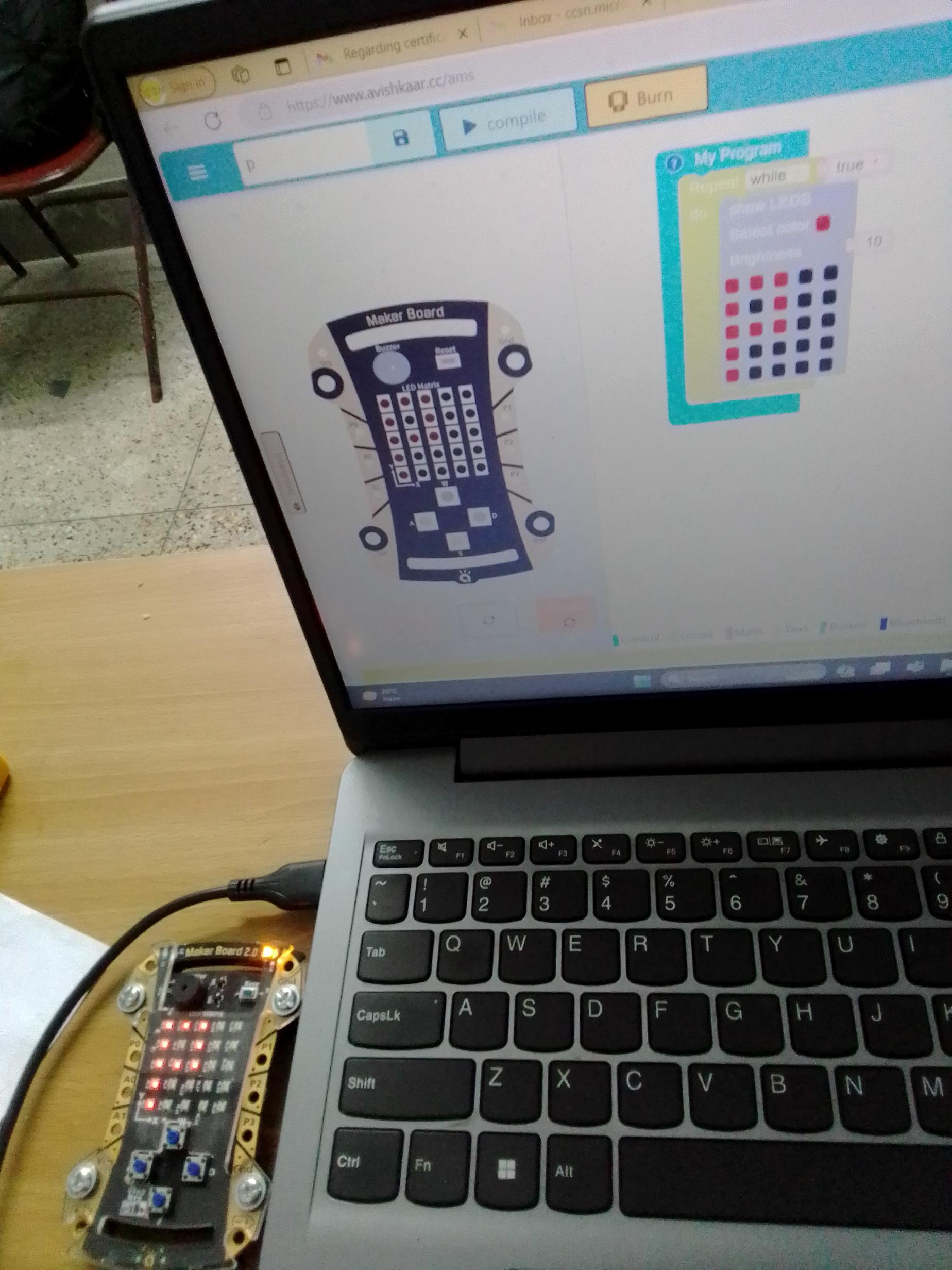
In this demonstration, we have written a character 'P' within the programming blocks and it is showing the same pattern 'P' within the device put at left side of the Laptop.
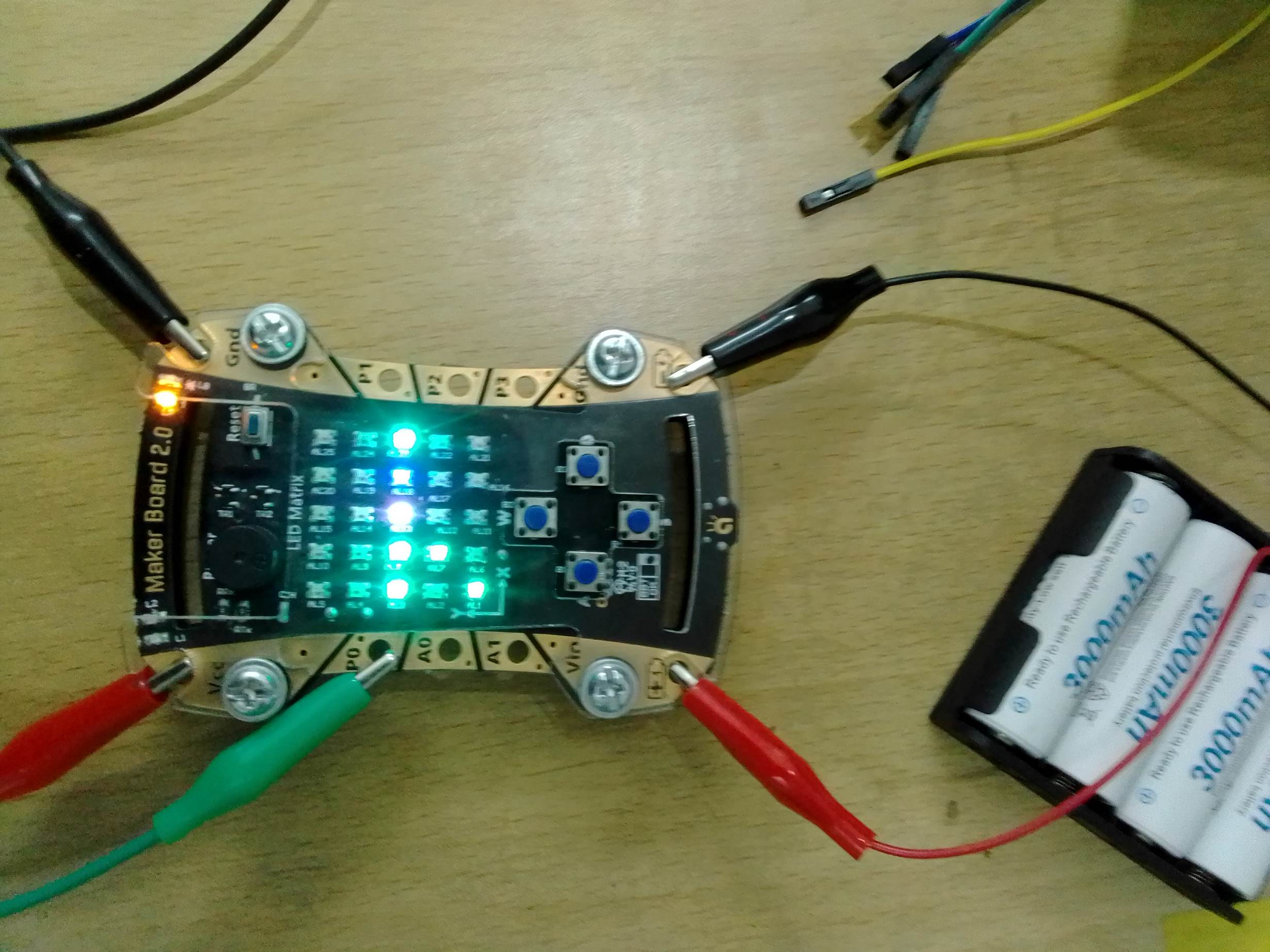
(5.b)Running pattern within the board: when program is uploaded within the memory of the board(main processor is ESP32-WROOM-32E, 448KB ROM, 520KB SRAM, 38 pins), when power is given by battery, it display the pattern within the 5x5 array of the LEDs as shown below:
Students of different levels like: School, College, University can develop their projects at our institute in our Laboratory. They can develop their project's documentations with the computer/Laptop available in our Laboratory. Proper guidance will be given by highly educated and experienced experts.
=====================================
Contacts: Arup Halder: arup@actsoft.org, (Mob:8777759402), dulalacharjee@gmail.com, Mob: 8240120380=====================================